
Maximaler Schutz im MRK-Betrieb: Z-Kollisionsschutz

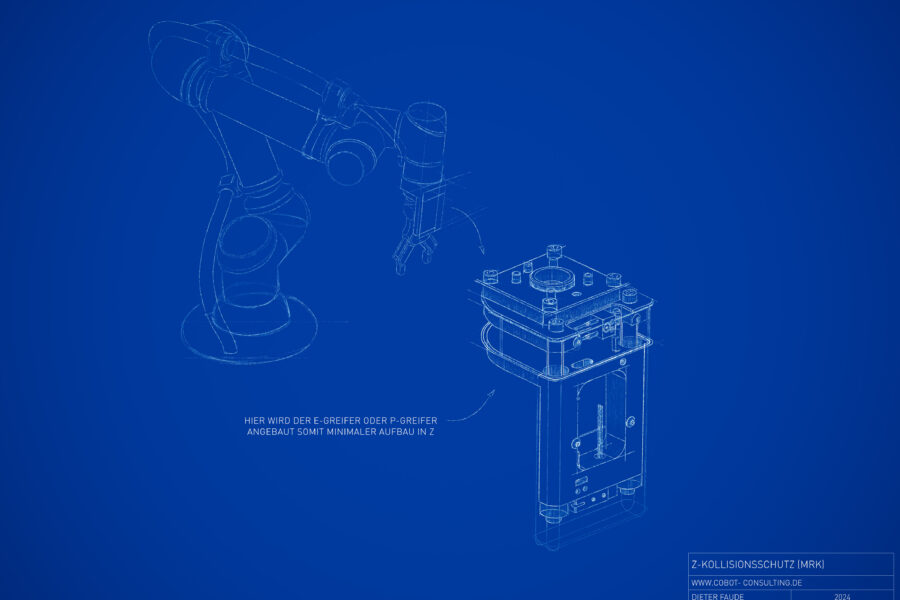
Cobot-Consulting Innovation: Der Z-Kollisionsschutz In der modernen Fertigungsindustrie sind Sicherheit und Effizienz im Mensch-Roboter-Kollaborationsbetrieb (MRK) von größter Bedeutung. Unfälle und Quetschungen durch vertikale Bewegungen der Roboterarme stellen eine ernsthafte Gefahr für Ihre Mitarbeiter dar. Traditionelle Sicherheitsmaßnahmen reichen oft nicht aus, um bestimmte Bauteile sicher zu handhaben und gleichzeitig die biomechanischen Grenzwerte gemäß TS 15066 einzuhalten. Funktionsfähiger Prototyp des Z-Kollisionsschutzes – zuverlässiger Schutz in der kollaborativen…
Dieter Faude18. Februar 2025


